安德烈·卡帕西一年前曾说:“Waymo 存在硬件问题,而特斯拉存在软件问题。” 旧金山停电导致 Waymo 服务中断,但特斯拉 FSD 服务却未受影响。我认为原因如下: Waymo采用“模块化”设计:它依赖于高清地图、激光雷达、传感器、5G网络以及众多神经网络。在单个模块出现故障之前,系统运行良好。当交通信号灯失效时,高清地图与实际情况不再匹配,因此车辆默认进入安全停车模式(砖块模式)。此外,车辆也与远程操作员失去了连接。 特斯拉的FSD是“端到端”的:一个庞大的神经网络直接将摄像头像素转化为转向和制动指令。这遵循了Andrej的软件2.0理念:无需为每种场景编写手动C++逻辑,而是利用数十亿英里的人类驾驶数据训练神经网络。“代码”就是模型权重。它的驾驶方式更接近人类。 我认为Waymo现在面临着巨大的软件问题。它的模块化设计是一个扩展性和依赖性陷阱。从长远来看,特斯拉的FSD(全自动驾驶)最终会胜出。
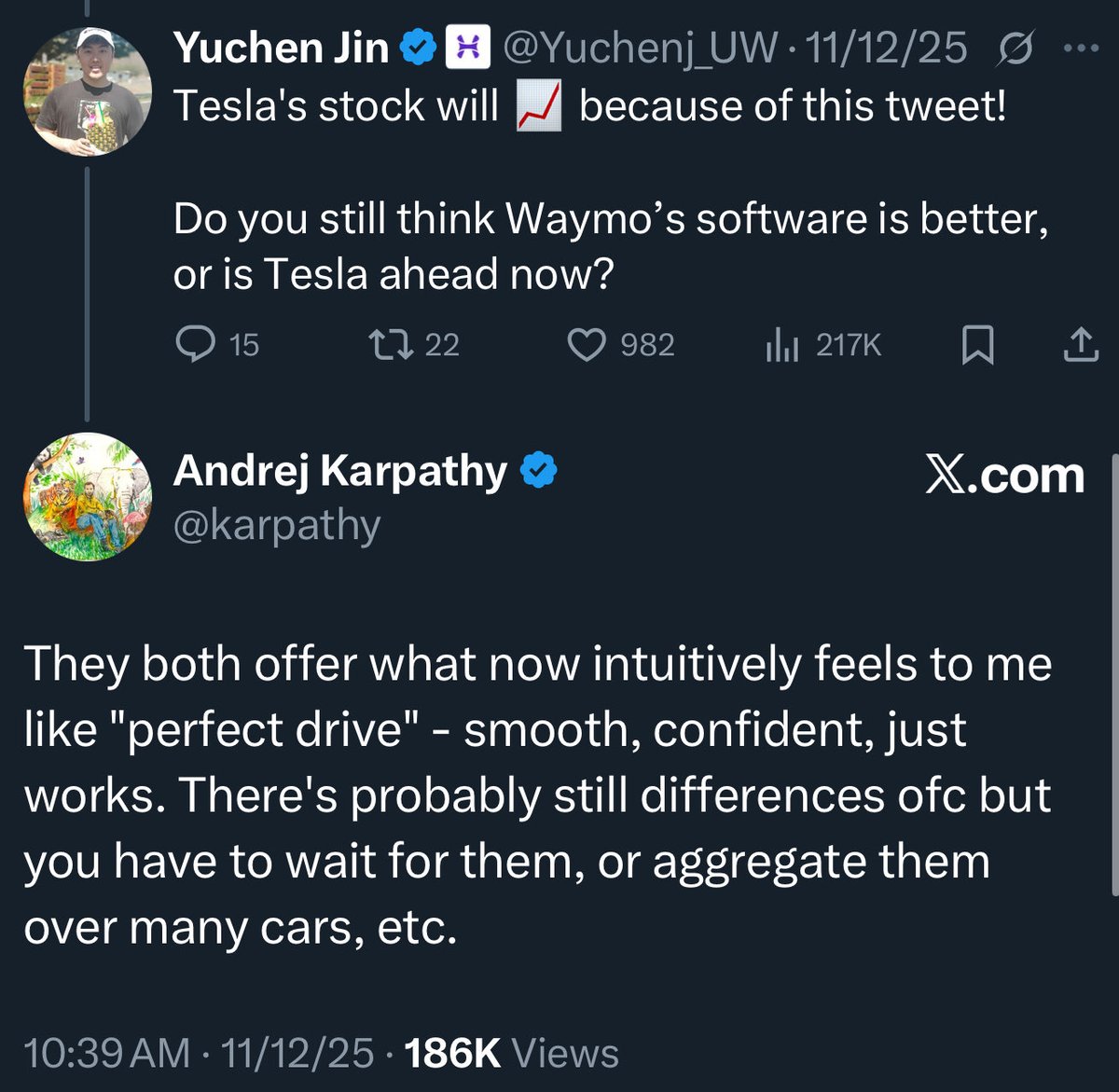
我问安德烈是否仍然认为 Waymo 的软件比特斯拉的更好。 他说现在两辆车开起来都感觉“完美”,虽然存在一些差异,但需要时间去体会。旧金山事件就是其中一个例子。