为了新版 beads_viewer (bv),我真的下了血本。最初的 bv 版本只用了一天时间就写完了,只有不到 7000 行 Go 代码。而这个新版本……足足有 8 万行!我添加了大量强大的功能。你的代理一定会喜欢它(你也会)。
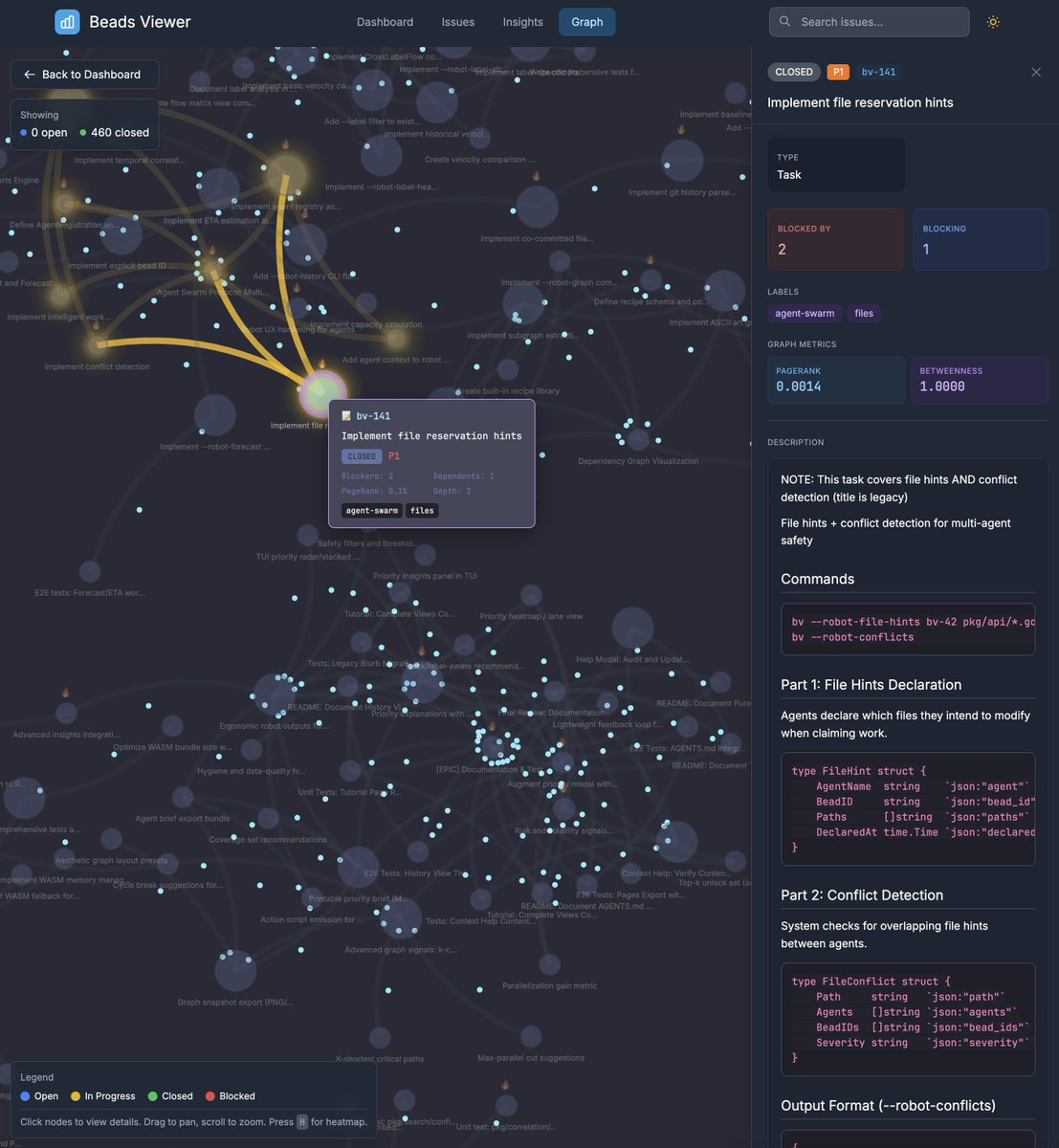



以下是一些截图,展示了如何使用 gh 工具将你的珠子自动导出到 GitHub Pages 上的静态网站:


您可以在这里尝试 beads_viewer 项目的实际示例(真是太元了!): https://t.co/UhboFtbSdZ
TUI也进行了大量改进,并新增了许多实用功能:




但就实际用途而言,最大的改进根本不是为了你们人类!而是为了你们的编码代理。 他们只需要运行一个简单的命令,bv --robot-triage,就能立即获得大量关于下一步工作内容的见解。


请务必更新 AGENTS.md 文件中的描述信息(尽管该工具现在会自动检测并询问您是否要为其添加!)。新的描述信息更长,但绝对值得占用额外的上下文窗口标记: ### 将 bv 用作 AI 边车 bv 是一个面向 Beads 项目(.beads/beads.jsonl)的图感知分类引擎。它无需解析 JSONL 或进行虚拟的图遍历,而是使用 robot 标志来生成确定性的、依赖感知的输出,并预先计算指标(PageRank、介数中心性、关键路径、循环、HITS、特征向量、k-core)。 **范围边界:** bv 负责处理*工作内容*(分类、优先级、计划)。对于代理之间的协调(消息传递、工作认领、文件预留),请使用 [MCP 代理邮件](https://t.co/vi3HxBUknU)。 **⚠️ 重要提示:请仅使用 `--robot-*` 参数。直接使用 `bv` 会启动一个交互式 TUI,从而阻塞您的会话。** #### 工作流程:从分诊开始 `bv --robot-triage` 是您的唯一入口点。它只需一次调用即可返回您所需的所有信息: - `quick_ref`:一目了然的计数 + 前 3 名精选 - `推荐`:按评分、理由和解锁信息排序的可操作项目 - `quick_wins`:投入少、影响大的物品 - `blockers_to_clear`:用于解除下游工作阻塞的项目 - `project_health`:状态/类型/优先级分布,图表指标 - `commands`:复制粘贴 shell 命令以执行后续步骤 bv --robot-triage # 超级命令:从这里开始 bv --robot-next # 最简配置:仅包含单个顶部拾取 + 认领命令 #### 其他命令 **规划:** | 命令 | 返回 | |---------|---------| | `--robot-plan` | 使用 `unblocks` 列表进行并行执行 | | `--robot-priority` | 优先级错位检测(置信度) | **图表分析:** | 命令 | 返回 | |---------|---------| | `--robot-insights` | 完整指标:PageRank、介数中心性、HITS(枢纽/权威)、特征向量、关键路径、循环次数、k-core、衔接点、Slack | | `--robot-label-health` | 每个标签的健康状况:`health_level`(健康|警告|严重),`velocity_score`,`staleness`,`blocked_count` | | `--robot-label-flow` | 跨标签依赖关系:`flow_matrix`、`dependencies`、`bottleneck_labels` | | `--robot-label-attention [--attention-limit=N]` | 按以下方式对标签进行注意力排名:(pagerank × staleness × block_impact)/ velocity | **历史记录与变更跟踪:** | 命令 | 返回 | |---------|---------| | `--robot-history` | 珠子到提交的相关性:`stats`、`histories`(每个珠子的事件/提交/里程碑)、`commit_index` | | `--robot-diff --diff-since ` | 自参考文献以来的更改:新增/关闭/修改的问题,引入/解决的循环 | **其他命令:** | 命令 | 返回 | |---------|---------| | `--robot-burndown ` | 迭代燃尽图、范围变更、风险项 | | `--robot-forecast ` | 基于依赖关系的调度预测预计到达时间 | | `--robot-alerts` | 过期问题、阻塞级联、优先级不匹配 | | `--robot-suggest` | 卫生:重复项、缺失依赖项、标签建议、循环中断 | | `--robot-graph [--graph-format=json\|dot\|mermaid]` | 依赖关系图导出 | | `--export-graph ` | 独立的交互式 HTML 可视化 | #### 范围界定和筛选 bv --robot-plan --label backend # 范围限定到标签的子图 bv --robot-insights --as-of HEAD~30 # 历史时间点 bv --recipe actionable --robot-plan # 预过滤:准备就绪(无阻塞程序) bv --recipe high-impact --robot-triage # 预筛选:PageRank 分数最高的 bv --robot-triage --robot-triage-by-track # 按并行工作流分组 bv --robot-triage --robot-triage-by-label # 按域分组 #### 了解机器人输出 **所有机器人 JSON 都包含:** - `data_hash` — 源 beads.jsonl 的指纹(验证不同调用之间的一致性) - `status` — 每个指标的状态:`computed|approx|timeout|skipped` + 经过的毫秒数 - `as_of` / `as_of_commit` — 使用 `--as-of` 时存在;包含引用和已解析的 SHA。 **两阶段分析:** - **第一阶段(即时):** 度数、地形排序、密度 — 始终可立即获取 - **第二阶段(异步,500毫秒超时):** PageRank、介数中心性、命中次数、特征向量、循环次数 — 检查 `status` 标志 **对于大型图(>500 个节点):**某些指标可能会被近似计算或跳过。请务必检查 `status`。 #### jq 快速参考 bv --robot-triage | jq '.quick_ref' # 概览摘要 bv --robot-triage | jq '.recommendations[0]' # 最高推荐 bv --robot-plan | jq '.plan.summary.highest_impact' # 最佳解除阻塞目标 bv --robot-insights | jq '.status' # 检查指标就绪情况 bv --robot-insights | jq '.Cycles' # 循环依赖(必须修复!) bv --robot-label-health | jq '.results.labels[] | select(.health_level == "critical")' 性能参数:第一阶段即时执行,第二阶段异步执行(超时时间为 500 毫秒)。如果速度至关重要,建议使用 `--robot-plan` 参数,而不是 `--robot-insights` 参数。结果按数据哈希值缓存。 使用 bv 而不是解析 beads.jsonl——它可以确定性地计算 PageRank、关键路径、循环和并行轨道。
总之,请告诉我你的想法!你可以在这里获取 bv,它始终免费,始终 100% 采用 MIT 许可的开源软件,并且是我用于代理编码的 7 个工具飞轮的一部分: https://t.co/pGNHTEqQHH
你可以访问我重新设计的个人网站,了解飞轮效应。我很享受我的经纪人帮我精心打造这个网站,而我可以安心地去做其他事情,他们使用的正是他们向我介绍的工具: https://t.co/2usm1h4hUf