安德烈·卡帕西一年前曾說:“Waymo 存在硬體問題,而特斯拉存在軟體問題。” 舊金山停電導致 Waymo 服務中斷,但特斯拉 FSD 服務卻不受影響。我認為原因如下: Waymo採用「模組化」設計:它依賴高清地圖、光達、感測器、5G網路以及眾多神經網路。在單一模組故障之前,系統運作良好。當交通號誌失效時,高清地圖與實際情況不再匹配,因此車輛預設進入安全停車模式(磚塊模式)。此外,車輛也與遠端操作員失去了連接。 特斯拉的FSD是「端到端」的:一個龐大的神經網路直接將相機像素轉化為轉向和煞車指令。這遵循了Andrej的軟體2.0理念:無需為每種場景編寫手動C++邏輯,而是利用數十億英里的人類駕駛資料訓練神經網路。 「程式碼」就是模型權重。它的駕駛方式更接近人類。 我認為Waymo現在面臨著巨大的軟體問題。它的模組化設計是一個擴展性和依賴性陷阱。從長遠來看,特斯拉的FSD(全自動駕駛)最終會勝出。
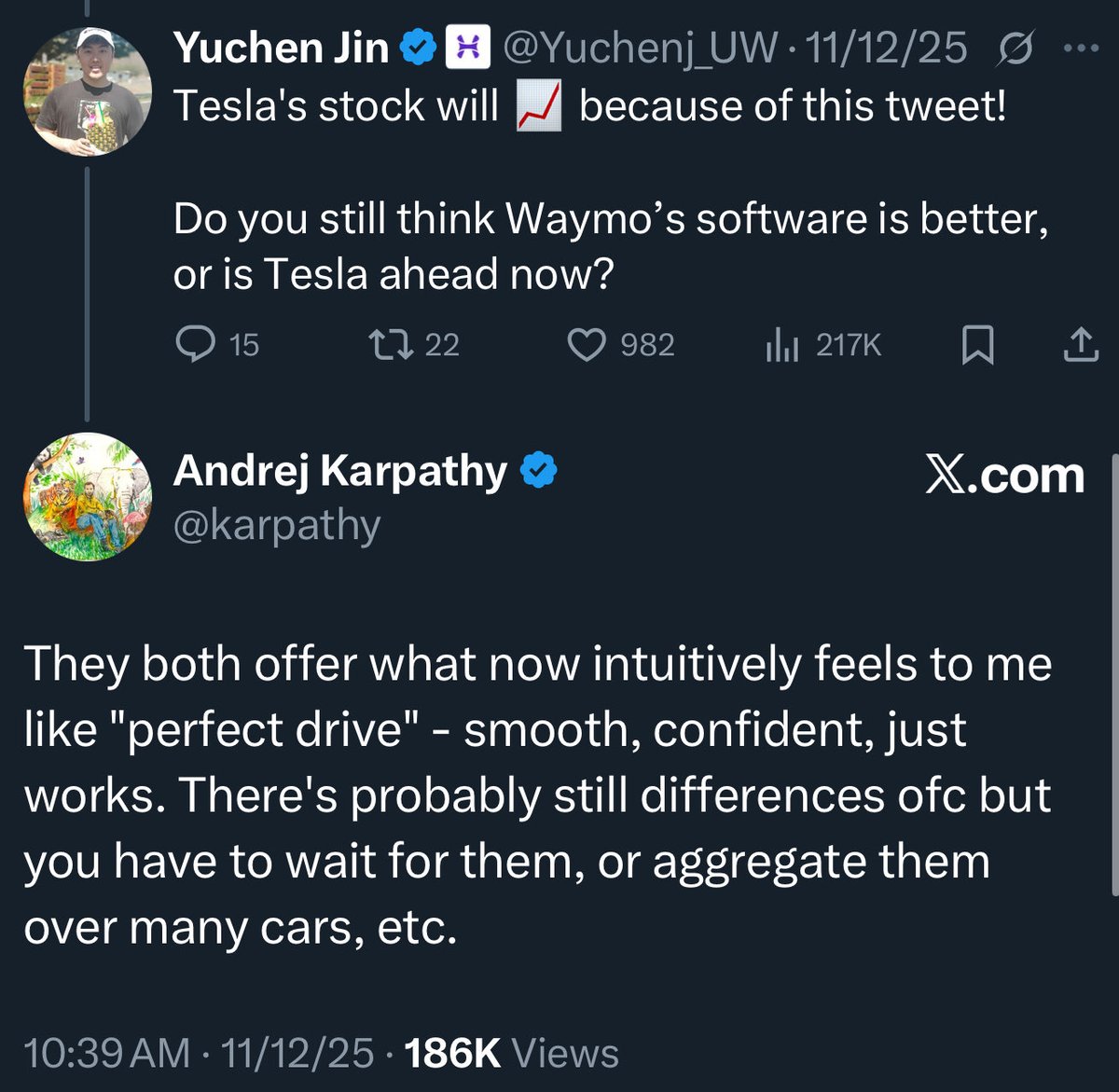
我問安德烈是否仍然認為 Waymo 的軟體比特斯拉的更好。 他說現在兩輛車開起來都感覺“完美”,雖然存在一些差異,但需要時間去體會。舊金山事件就是其中一個例子。