Há um ano, Andrej Karpathy disse: "A Waymo tem um problema de hardware, enquanto a Tesla tem um problema de software." A queda de energia em São Francisco congelou o Waymo, mas não o FSD da Tesla. Eis o porquê, na minha opinião: A Waymo é “modular”: utiliza mapas de alta definição, LiDAR, sensores, 5G e diversas redes neurais. Funciona bem até que um único módulo falhe. Quando os semáforos pararam de funcionar, o mapa de alta definição deixou de corresponder à realidade, fazendo com que o carro parasse automaticamente (modo de segurança). Além disso, os carros perderam a conexão com os operadores remotos. O FSD da Tesla é "de ponta a ponta": uma enorme rede neural converte pixels da câmera diretamente em direção e frenagem. Isso segue a ideia do Software 2.0 de Andrej: em vez de escrever lógica C++ manualmente para cada cenário, você treina uma rede neural com bilhões de quilômetros percorridos por humanos. O "código" são os pesos do modelo. O resultado é uma direção mais parecida com a de um humano. Acho que a Waymo agora enfrenta um grande problema de software. Sua abordagem modular é uma armadilha de escalabilidade e dependência. A longo prazo, o FSD da Tesla sairá vitorioso.
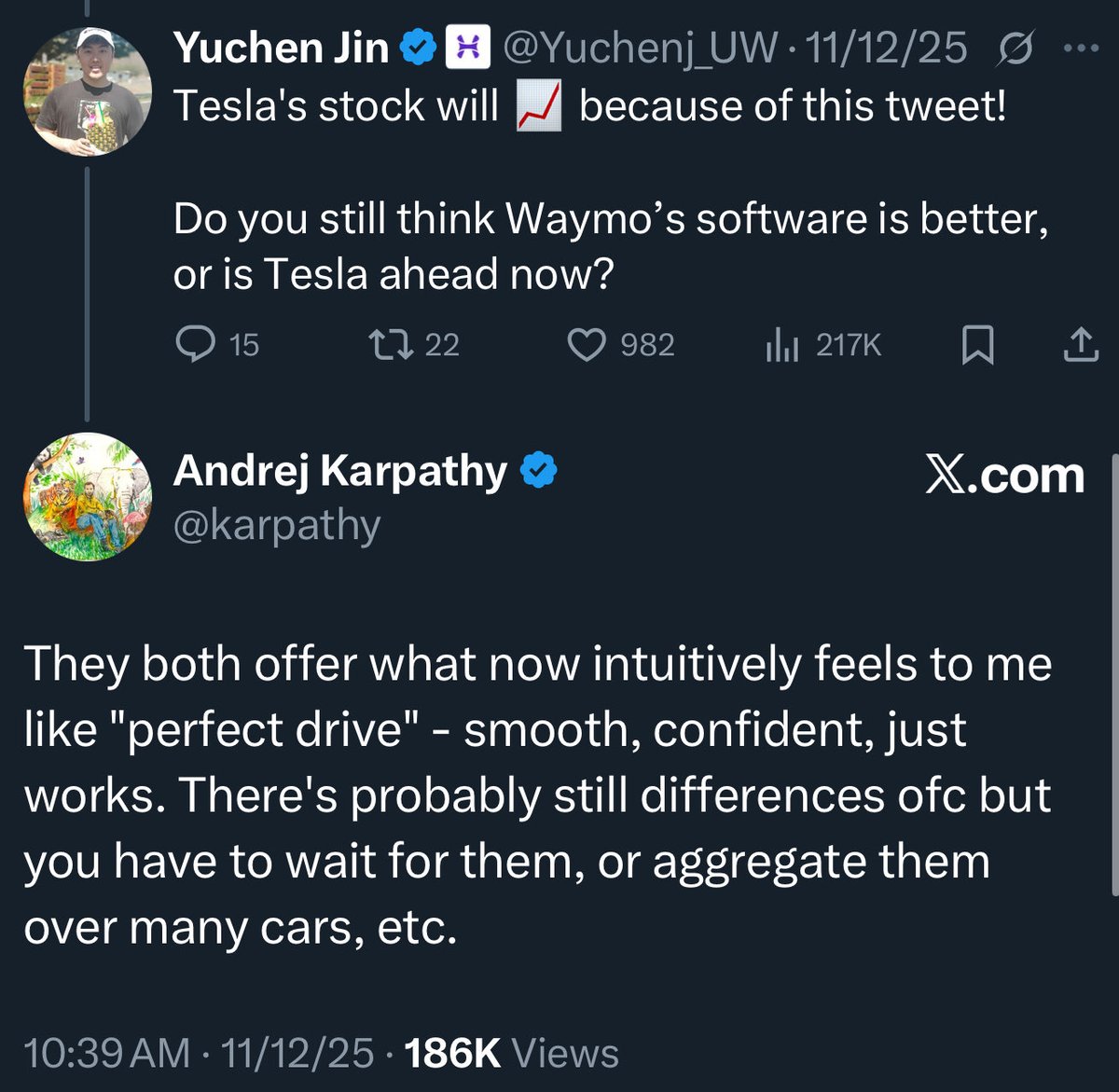
Perguntei a Andrej se ele ainda acha que o software da Waymo é melhor que o da Tesla. Ele disse que ambos parecem estar "perfeitos para dirigir" agora, que existem diferenças, mas que é preciso esperar para vê-las. O incidente em São Francisco foi um desses casos.