Eu realmente me esforcei ao máximo na nova versão do beads_viewer (bv). A versão original do bv foi feita em um único dia e tinha pouco menos de 7 mil linhas de código Go. Esta nova versão tem… 80 mil linhas. Adicionei uma quantidade enorme de recursos incríveis. Seus agentes vão adorar (você também).



Mais algumas capturas de tela do recurso que permite exportar automaticamente seus beads para um site estático no GitHub Pages usando o utilitário gh:


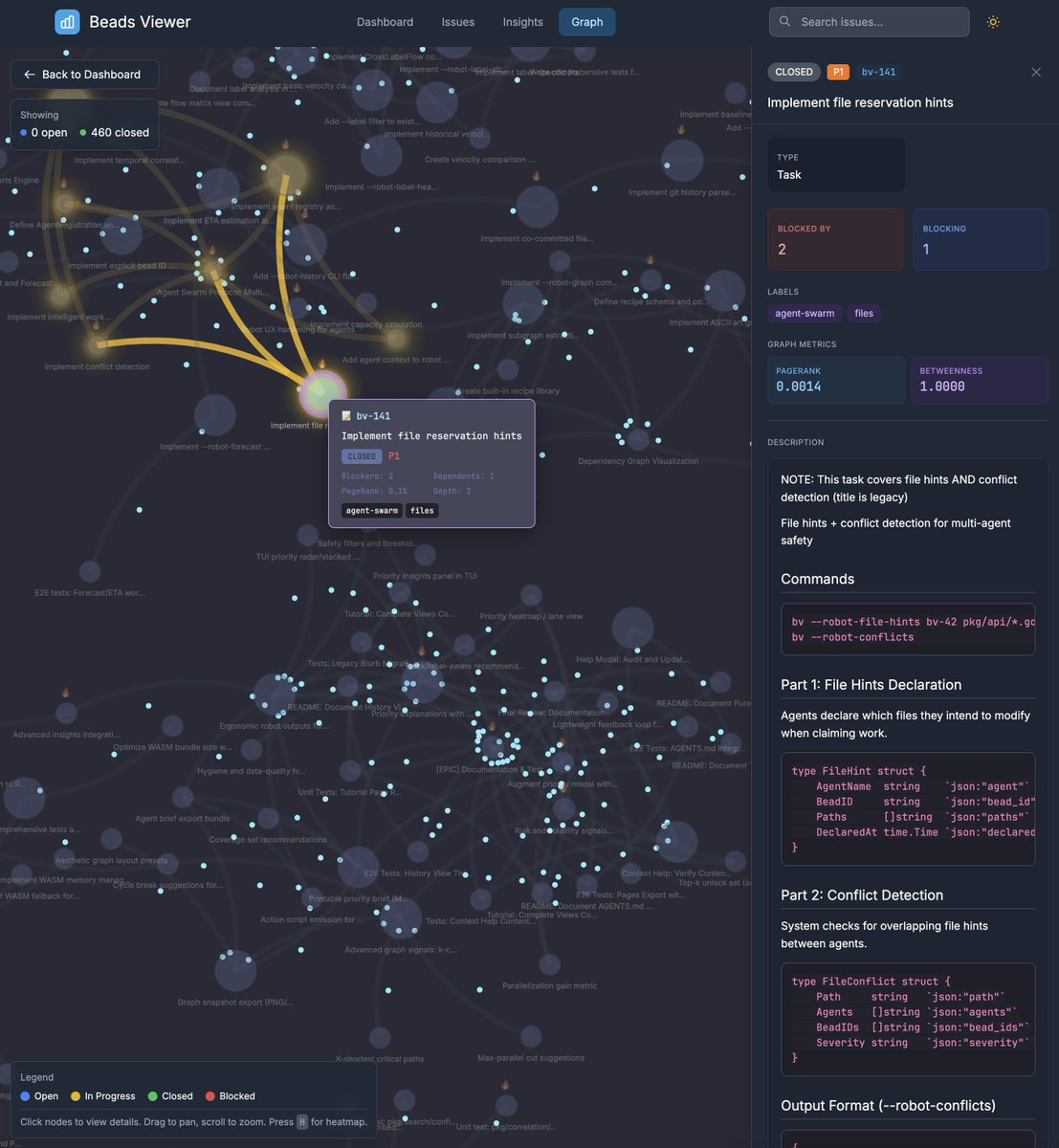
Você pode experimentar um exemplo ao vivo do próprio projeto beads_viewer (tão medicklesworthstone.github.io/beads_viewer-p… https://t.co/UhboFtbSdZ
A interface de usuário TUI também recebeu inúmeras melhorias e muitos recursos novos e úteis:




Mas a maior melhoria em termos de utilidade prática não é para vocês, humanos! É para os seus agentes de programação. Basta executar um comando simples, bv --robot-triage, e eles obtêm instantaneamente uma enorme quantidade de informações sobre o que fazer em seguida.


Certifique-se de atualizar a descrição no seu arquivo AGENTS.md (embora a ferramenta agora detecte isso automaticamente e pergunte se você deseja adicioná-la!). A nova descrição é mais longa, mas vale a pena pelos tokens adicionais na janela de contexto: ### Usando bv como um sidecar de IA O bv é um mecanismo de triagem com reconhecimento de grafos para projetos Beads (.beads/beads.jsonl). Em vez de analisar JSONL ou tentar percorrer grafos de forma complexa, use flags do robots.txt para obter resultados determinísticos e com reconhecimento de dependências, com métricas pré-computadas (PageRank, centralidade de intermediação, caminho crítico, ciclos, HITS, autovetor, k-core). **Delimitação de escopo:** bv lida com *o que trabalhar* (triagem, prioridade, planejamento). Para coordenação entre agentes (mensagens, atribuição de trabalho, reservas de arquivos), use [MCP Agent Mail](https://t.co/vi3HxBUknU). **⚠️ CRÍTICO: Use SOMENTE as opções `--robot-*`. O uso de `bv` sem nenhuma configuração inicia uma interface de usuário interativa (TUI) que bloqueia sua sessão.** #### O Fluxo de Trabalho: Comece com a Triagem **`bv --robot-triage` é o seu ponto de entrada único.** Ele retorna tudo o que você precisa em uma única chamada: - `quick_ref`: contagem rápida + 3 melhores escolhas - `recomendações`: itens acionáveis classificados com pontuações, motivos e informações para desbloqueio. - `vitórias_rápidas`: itens de baixo esforço e alto impacto - `blockers_to_clear`: itens que desbloqueiam o trabalho mais subsequente. - `project_health`: distribuições de status/tipo/prioridade, métricas de grafo - `comandos`: copie e cole os comandos do shell para os próximos passos bv --triagem-robótica # O MEGA-COMANDO: comece aqui bv --robot-next # Mínimo: apenas a seleção única do robô principal + comando de reivindicação #### Outros comandos **Planejamento:** | Comando | Retorna | |---------|---------| | `--robot-plan` | Trilhas de execução paralela com listas `unblocks` | | `--robot-priority` | Detecção de desalinhamento de prioridade com confiança | **Análise de Gráficos:** | Comando | Retorna | |---------|---------| | `--robot-insights` | Métricas completas: PageRank, centralidade de intermediação, HITS (hubs/autoridades), autovetor, caminho crítico, ciclos, k-core, pontos de articulação, folga | | `--robot-label-health` | Saúde por rótulo: `health_level` (saudável | aviso | crítico), `velocity_score`, `staleness`, `blocked_count` | | `--robot-label-flow` | Dependência entre rótulos: `flow_matrix`, `dependencies`, `bottleneck_labels` | | `--robot-label-attention [--attention-limit=N]` | Rótulos classificados por atenção por: (pagerank × obsolescência × impacto_do_bloco) / velocidade | **Histórico e Rastreamento de Alterações:** | Comando | Retorna | |---------|---------| | `--robot-history` | Correlações entre Bead e Commit: `stats`, `histories` (eventos/commits/marcos por Bead), `commit_index` | | `--robot-diff --diff-since ` | Alterações desde a referência: problemas novos/fechados/modificados, ciclos introduzidos/resolvidos | **Outros comandos:** | Comando | Retorna | |---------|---------| | `--robot-burndown ` | Análise de burndown da sprint, alterações de escopo, itens em risco | | `--robot-forecast ` | Previsões de ETA com agendamento que leva em consideração as dependências | | `--robot-alerts` | Problemas antigos, bloqueios em cascata, incompatibilidades de prioridade | | `--robot-suggest` | Higiene: duplicados, dependências ausentes, sugestões de rótulos, quebras de ciclo | | `--robot-graph [--graph-format=json\|dot\|mermaid]` | Exportação do gráfico de dependências | | `--export-graph ` | Visualização HTML interativa e independente | #### Escopo e Filtragem bv --robot-plan --label backend # Escopo para rotular o subgrafo bv --robot-insights --as-of HEAD~30 # Ponto histórico no tempo bv --receita acionável --plano-robot # Pré-filtro: pronto para trabalhar (sem bloqueadores) bv --receita de alto impacto --triagem de robôs # Pré-filtro: pontuações PageRank mais altas bv --robot-triage --robot-triage-by-track # Agrupar por fluxos de trabalho paralelos bv --robot-triage --robot-triage-by-label # Agrupar por domínio #### Compreendendo a saída do robô **Todos os arquivos JSON do robô incluem:** - `data_hash` — Impressão digital do arquivo beads.jsonl de origem (verifica a consistência entre as chamadas) - `status` — Estado por métrica: `computado|aproximado|tempo limite|ignorado` + ms decorridos - `as_of` / `as_of_commit` — Presente ao usar `--as-of`; contém a referência e o SHA resolvido. **Análise bifásica:** - **Fase 1 (instantânea):** grau, classificação topológica, densidade — sempre disponível imediatamente - **Fase 2 (assíncrona, tempo limite de 500 ms):** PageRank, centralidade de intermediação, HITS, autovetor, ciclos — verificar os indicadores `status` **Para grafos grandes (>500 nós):** Algumas métricas podem ser aproximadas ou ignoradas. Sempre verifique o `status`. #### Referência Rápida jq bv --robot-triage | jq '.quick_ref' # Resumo rápido bv --robot-triage | jq '.recommendations[0]' # Recomendação principal bv --robot-plan | jq '.plan.summary.highest_impact' # Melhor alvo de desbloqueio bv --robot-insights | jq '.status' # Verificar prontidão da métrica bv --robot-insights | jq '.Cycles' # Dependências circulares (precisa ser corrigida!) bv --robot-label-health | jq '.results.labels[] | select(.health_level == "critical")' **Desempenho:** Fase 1 instantânea, Fase 2 assíncrona (tempo limite de 500 ms). Prefira `--robot-plan` a `--robot-insights` quando a velocidade for importante. Resultados armazenados em cache por hash de dados. Use o bv em vez de analisar o beads.jsonl — ele calcula o PageRank, os caminhos críticos, os ciclos e as trilhas paralelas de forma determinística.
Enfim, me diga o que você acha! Você pode obter o bv aqui, sempre gratuito, sempre 100% de código aberto com licença MIT e parte do meu conjunto de 7 ferramengithub.com/Dicklesworthst… agentes: https://t.co/pGNHTEqQHH
Você pode explorar o conceito de flywheel no meu site pessoal reformulado, que meus agentes tiveram o prazer de aprimorar para mim enquanto eu trabalhava em outras coisas, usando as mesmas jeffreyemanuel.com/projects descreveram: https://t.co/2usm1h4hUf