안드레이 카르파티는 1년 전 "웨이모는 하드웨어 문제가 있고, 테슬라는 소프트웨어 문제가 있다"고 말했다. 샌프란시스코 정전으로 웨이모는 작동이 멈췄지만, 테슬라 FSD는 멈추지 않았습니다. 제 생각에는 그 이유는 다음과 같습니다. Waymo는 "모듈식" 구조를 가지고 있습니다. HD 지도, LiDAR, 센서, 5G, 그리고 다양한 신경망에 의존합니다. 단일 모듈에 문제가 생기기 전까지는 잘 작동합니다. 신호등이 고장 나자 HD 지도가 현실과 일치하지 않게 되었고, 차량은 안전 정지 모드(벽돌 모드)로 전환되었습니다. 또한, 차량은 원격 운영자와의 연결도 끊어졌습니다. 테슬라 FSD는 "엔드 투 엔드" 방식입니다. 거대한 신경망이 카메라 픽셀을 직접 조향 및 제동으로 변환합니다. 이는 안드레이의 소프트웨어 2.0 개념을 따르는 것으로, 모든 시나리오에 대해 수동으로 C++ 로직을 작성하는 대신 수십억 마일에 달하는 인간 주행 데이터를 기반으로 신경망을 학습시키는 것입니다. 여기서 "코드"는 모델의 가중치입니다. 결과적으로 테슬라 FSD는 인간처럼 운전하는 데 더 가까워집니다. 제 생각에 웨이모는 현재 심각한 소프트웨어 문제를 안고 있습니다. 모듈식 접근 방식은 확장성과 의존성 문제를 야기하는 함정입니다. 장기적으로는 테슬라의 완전 자율 주행(FSD) 기술이 승리할 것입니다.
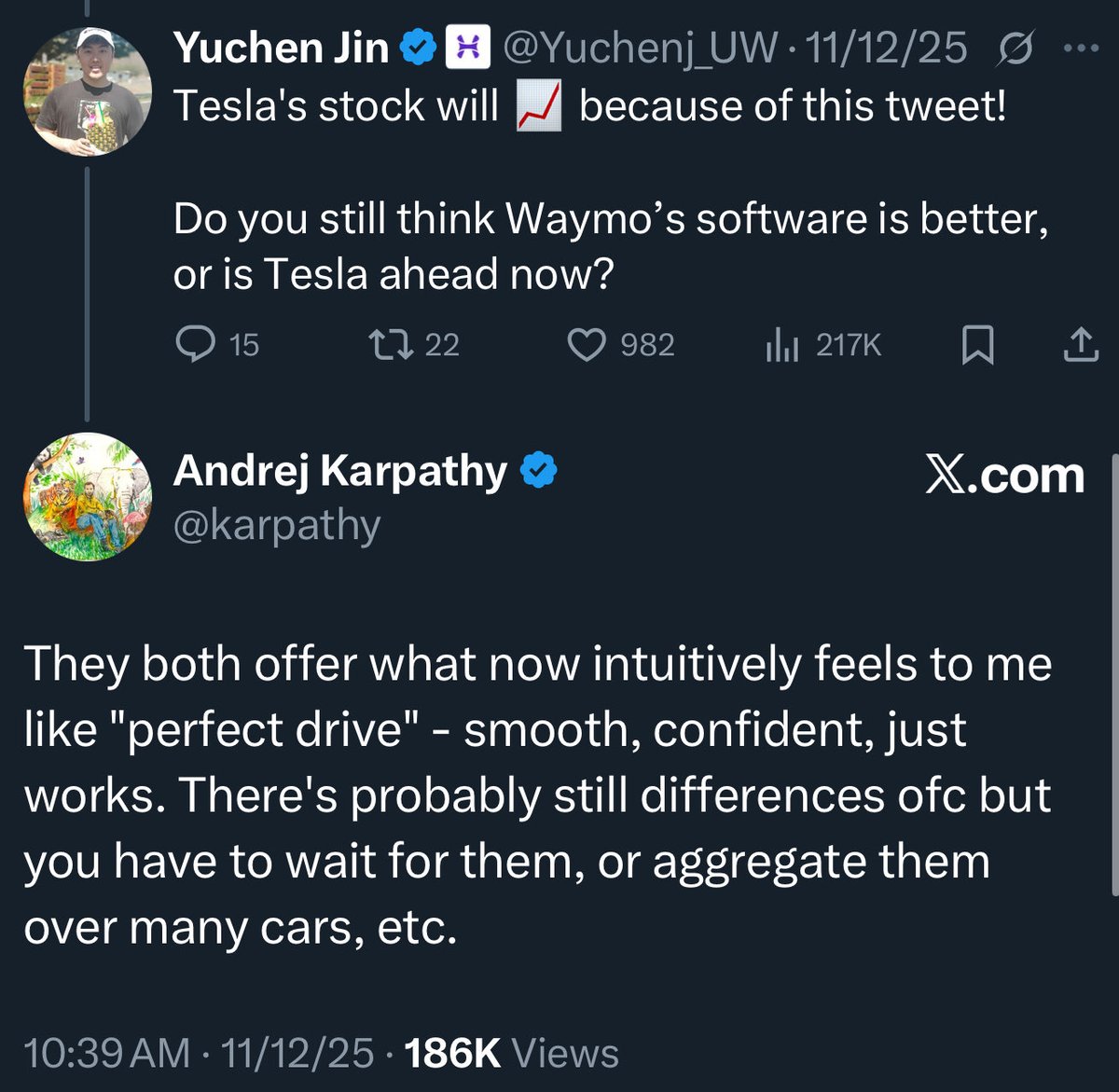
나는 안드레이에게 웨이모의 소프트웨어가 테슬라의 소프트웨어보다 여전히 더 낫다고 생각하는지 물었다. 그는 두 차량 모두 지금은 "완벽한 드라이브"처럼 느껴진다고 말하면서, 차이점은 있지만 기다려야 한다고 했습니다. SF 사건이 바로 그런 사례 중 하나였습니다.