새 버전의 beads_viewer(bv)를 위해 정말 모든 노력을 기울였습니다. 기존 bv는 단 하루 만에 7천 줄이 조금 안 되는 Golang 코드로 만들어졌지만, 이번 새 버전은 무려 8만 줄에 달합니다. 엄청나게 많은 훌륭한 기능들을 추가했으니, 담당자분들(그리고 여러분 자신) 모두 만족하실 겁니다.



gh 유틸리티를 사용하여 비즈를 GitHub Pages의 정적 사이트로 자동 내보낼 수 있는 기능의 추가 스크린샷입니다.


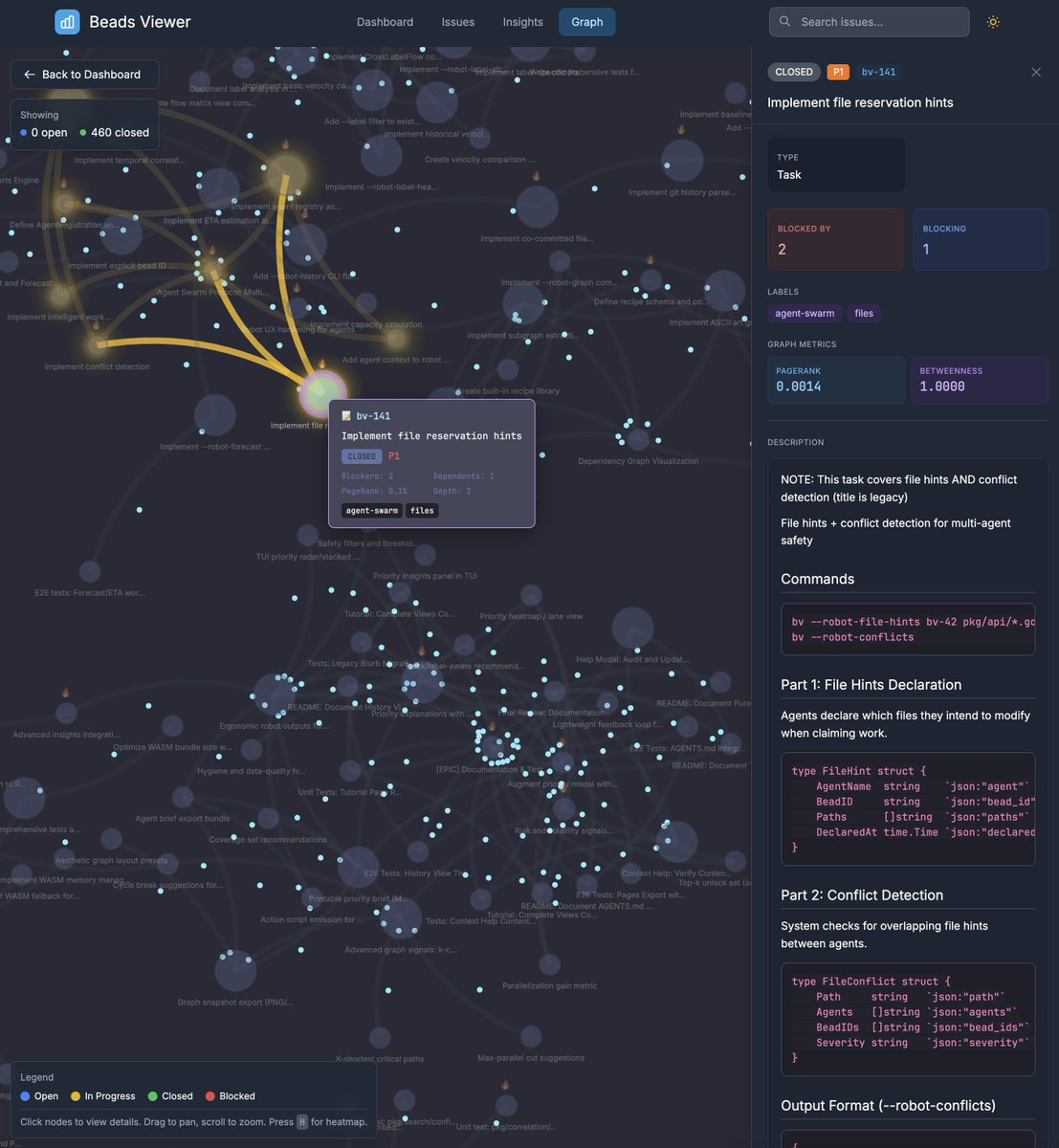
beads_viewer 프로젝트 자체의 실제 예제를 여기에서 사용해 볼 수 있습니다(정말 메타적이네요!). https://t.co/UhboFtbSdZ
TUI에도 수많은 개선 사항과 새롭고 유용한 기능들이 추가되었습니다.




하지만 실질적인 유용성 측면에서 가장 큰 개선점은 바로 여러분 인간을 위한 것이 아닙니다! 코딩 에이전트를 위한 것이죠. 그들은 단지 `bv --robot-triage`라는 간단한 명령 하나만 실행하면, 다음에 무엇을 해야 할지에 대한 엄청난 양의 통찰력을 즉시 얻을 수 있습니다.


AGENTS.md 파일의 설명문을 꼭 업데이트하세요(이제 도구가 자동으로 감지하여 추가할지 묻습니다!). 새 설명문은 더 길지만, 추가적인 컨텍스트 창 토큰을 생각하면 충분히 가치가 있습니다. ### bv를 AI 사이드카로 사용하기 bv는 Beads 프로젝트(.beads/beads.jsonl)를 위한 그래프 인식 트리아지 엔진입니다. JSONL을 파싱하거나 그래프 탐색을 상상하는 대신, 로봇 플래그를 사용하여 미리 계산된 메트릭(PageRank, 매개 중심성, 임계 경로, 사이클, HITS, 고유 벡터, k-core)을 기반으로 예측 가능하고 의존성을 고려한 출력을 생성합니다. **업무 범위:** bv는 *무엇을 처리할지* (분류, 우선순위, 계획)를 관리합니다. 상담원 간 협업(메시지, 업무 배정, 파일 예약)은 [MCP 상담원 메일](https://t.co/vi3HxBUknU)을 이용하세요. **⚠️ 중요: 반드시 `--robot-*` 플래그만 사용하십시오. `bv`만 입력하면 세션을 차단하는 대화형 TUI가 실행됩니다.** #### 워크플로: 초기 분류부터 시작하세요 **`bv --robot-triage`가 바로 여러분의 유일한 진입점입니다.** 이 명령어를 한 번만 실행하면 필요한 모든 정보를 얻을 수 있습니다. - `quick_ref`: 한눈에 보는 주요 항목 수 + 상위 3개 추천 - '권장 사항': 점수, 이유, 차단 해제 정보와 함께 순위가 매겨진 실행 가능한 항목 - '빠른 성과': 적은 노력으로 큰 효과를 볼 수 있는 항목 - `blockers_to_clear`: 가장 후속 작업의 차단을 해제하는 항목 - `project_health`: 상태/유형/우선순위 분포, 그래프 메트릭 - `commands`: 다음 단계를 위한 셸 명령어를 복사하여 붙여넣으세요. bv --robot-triage # 메가 명령어: 여기서 시작하세요 bv --robot-next # 최소 버전: 최상위 픽 하나와 클레임 명령만 실행 #### 기타 명령어 **계획:** | 명령 | 반환값 | |---------|---------| | `--robot-plan` | `unblocks` 목록을 사용한 병렬 실행 트랙 | | `--robot-priority` | 우선순위 불일치 감지 (확률 포함) | **그래프 분석:** | 명령 | 반환값 | |---------|---------| | `--robot-insights` | 전체 지표: PageRank, 매개 중심성, HITS(허브/권한), 고유 벡터, 임계 경로, 사이클, k-core, 연결 지점, 여유 시간 | | `--robot-label-health` | 레이블별 상태: `health_level`(건강\|경고\|심각), `velocity_score`, `staleness`, `blocked_count` | | `--robot-label-flow` | 레이블 간 종속성: `flow_matrix`, `dependencies`, `bottleneck_labels` | | `--robot-label-attention [--attention-limit=N]` | 어텐션 순위 지정 기준: (페이지랭크 × 오래됨 × 블록 영향도) / 속도 | **이력 및 변경 내역 추적:** | 명령 | 반환값 | |---------|---------| | `--robot-history` | 비드-커밋 상관관계: `stats`, `histories`(비드별 이벤트/커밋/마일스톤), `commit_index` | | `--robot-diff --diff-since ` | 참조 이후 변경 사항: 새 이슈/닫힌 이슈/수정된 이슈, 도입/해결된 순환 참조 | **기타 명령어:** | 명령 | 반환값 | |---------|---------| | `--robot-burndown ` | 스프린트 번다운, 범위 변경, 위험 항목 | | `--robot-forecast ` | 종속성 인식 스케줄링을 통한 예상 도착 시간(ETA) 예측 | | `--robot-alerts` | 오래된 이슈, 차단 연쇄 반응, 우선순위 불일치 | | `--robot-suggest` | 위생: 중복, 누락된 종속성, 레이블 제안, 순환 참조 끊김 | | `--robot-graph [--graph-format=json\|dot\|mermaid]` | 종속성 그래프 내보내기 | | `--export-graph ` | 자체 포함형 대화형 HTML 시각화 | #### 범위 지정 및 필터링 bv --robot-plan --label backend # 레이블의 하위 그래프로 범위 지정 bv --robot-insights --as-of HEAD~30 # 과거 시점 bv --recipe actionable --robot-plan # 사전 필터: 작업 준비 완료(차단 요소 없음) bv --recipe high-impact --robot-triage # 사전 필터: 상위 PageRank 점수 bv --robot-triage --robot-triage-by-track # 병렬 작업 스트림별로 그룹화 bv --robot-triage --robot-triage-by-label # 도메인별 그룹화 #### 로봇 출력 이해하기 **모든 로봇 JSON에는 다음이 포함됩니다:** - `data_hash` — 소스 beads.jsonl의 지문(호출 간 일관성 검증) - `상태` — 측정 항목별 상태: `계산됨|대략값|시간 초과|건너뛰기` + 경과 시간(밀리초) - `as_of` / `as_of_commit` — `--as-of` 옵션을 사용할 때 표시되며, 참조 번호와 해결된 SHA 값을 포함합니다. **2단계 분석:** - **1단계(즉시):** 각도, 지형 정렬, 밀도 — 항상 즉시 이용 가능 - **2단계(비동기, 500ms 타임아웃):** PageRank, 매개 중심성, HITS, 고유 벡터, 사이클 — `status` 플래그를 확인하세요. **대규모 그래프(노드 500개 이상)의 경우:** 일부 메트릭이 근사치로 계산되거나 생략될 수 있습니다. 항상 `status`를 확인하세요. #### jq 빠른 참조 bv --robot-triage | jq '.quick_ref' # 한눈에 보는 요약 bv --robot-triage | jq '.recommendations[0]' # 최상위 추천 bv --robot-plan | jq '.plan.summary.highest_impact' # 최적의 차단 해제 대상 bv --robot-insights | jq '.status' # 메트릭 준비 상태 확인 bv --robot-insights | jq '.Cycles' # 순환 종속성 (반드시 수정해야 함!) bv --robot-label-health | jq '.results.labels[] | select(.health_level == "critical")' **성능:** 1단계는 즉시 실행, 2단계는 비동기식(500ms 타임아웃)입니다. 속도가 중요한 경우 `--robot-insights`보다 `--robot-plan`을 사용하는 것이 좋습니다. 결과는 데이터 해시를 기준으로 캐시됩니다. beads.jsonl을 파싱하는 대신 bv를 사용하세요. bv는 PageRank, 중요 경로, 사이클 및 병렬 트랙을 결정론적으로 계산합니다.
어쨌든, 어떻게 생각하시는지 알려주세요! bv는 여기에서 다운로드하실 수 있으며, 항상 무료이고 100% MIT 라이선스가 적용된 오픈 소스입니다. 또한 제가 만든 에이전트 코딩용 7가지 도구 모음 중 하나입니다. https://t.co/pGNHTEqQHH
새롭게 단장한 제 개인 웹사이트에서 플라이휠 원리를 살펴보실 수 있습니다. 제가 다른 일을 하는 동안 에이전트들이 제게 설명해 준 바로 그 도구들을 활용해서 웹사이트를 멋지게 꾸며 놓았는데, 정말 만족스럽습니다. https://t.co/2usm1h4hUf