アンドレイ・カルパシー氏は1年前、「ウェイモにはハードウェアの問題があり、テスラにはソフトウェアの問題がある」と述べた。 サンフランシスコの停電でWaymoはフリーズしましたが、TeslaのFSDはフリーズしませんでした。その理由は以下だと思います。 Waymoは「モジュール型」です。HDマップ、LiDAR、センサー、5G、そして多数のニューラルネットワークを活用しています。1つのモジュールが故障するまでは順調に機能していましたが、信号が消えるとHDマップが現実世界と合致しなくなり、車両は安全停止(ブリックモード)に切り替わりました。また、車両は遠隔操作者との接続も切断されました。 テスラのFSDは「エンドツーエンド」です。1つの巨大なニューラルネットワークがカメラのピクセルをステアリングとブレーキに直接変換します。これはアンドレイのソフトウェア2.0の考え方に基づいています。あらゆるシナリオに合わせてC++ロジックを手動で記述するのではなく、数十億マイルもの人間の走行データでニューラルネットワークを学習させます。「コード」とはモデルの重み付けです。これにより、より人間に近い運転が可能になります。 Waymoは現在、ソフトウェア面で大きな問題を抱えていると思います。モジュール型のアプローチは、スケーリングと依存性という罠に陥ります。長期的には、TeslaのFSDが勝利するでしょう。
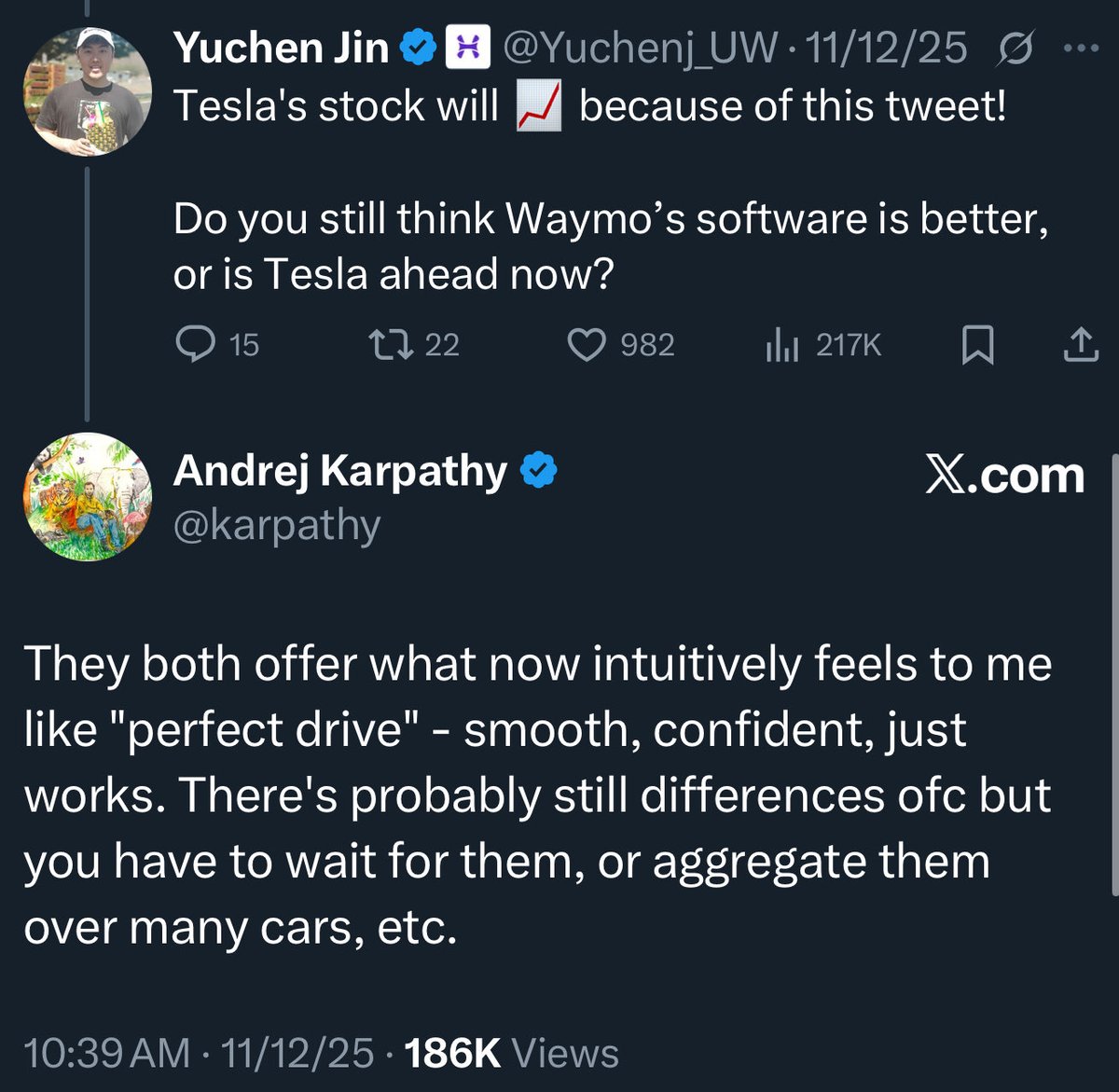
私はアンドレイ氏に、ウェイモのソフトウェアがテスラのソフトウェアより優れていると今でも思っているかと尋ねた。 彼は、どちらも今は「完璧なドライブ」に感じられるが、違いはあるものの、それが現れてくるまでには時間がかかると語った。サンフランシスコでの事故はまさにその例だった。