Il y a un an, Andrej Karpathy déclarait : « Waymo a un problème matériel, tandis que Tesla a un problème logiciel. » La panne de courant à San Francisco a paralysé Waymo, mais pas Tesla FSD. Voici pourquoi, à mon avis : Waymo est un système modulaire : il repose sur des cartes HD, le LiDAR, des capteurs, la 5G et de nombreux réseaux neuronaux. Son fonctionnement est optimal jusqu’à la défaillance d’un seul module. Lorsque les feux de circulation sont tombés en panne, la carte HD n’était plus en adéquation avec la réalité, et le véhicule s’est immobilisé (mode blocage). De plus, les véhicules ont perdu la connexion avec les opérateurs à distance. Le système FSD de Tesla est « de bout en bout » : un immense réseau neuronal convertit directement les pixels de la caméra en commandes de direction et de freinage. Ceci s'inscrit dans le cadre du concept de logiciel 2.0 d'Andrej : au lieu d'écrire manuellement du code C++ pour chaque scénario, on entraîne un réseau neuronal sur des milliards de kilomètres parcourus par des humains. Le « code » correspond aux poids du modèle. La conduite est ainsi beaucoup plus naturelle. Je pense que Waymo a désormais un énorme problème logiciel. Son approche modulaire représente un piège en termes d'évolutivité et de dépendances. À long terme, Tesla FSD l'emportera.
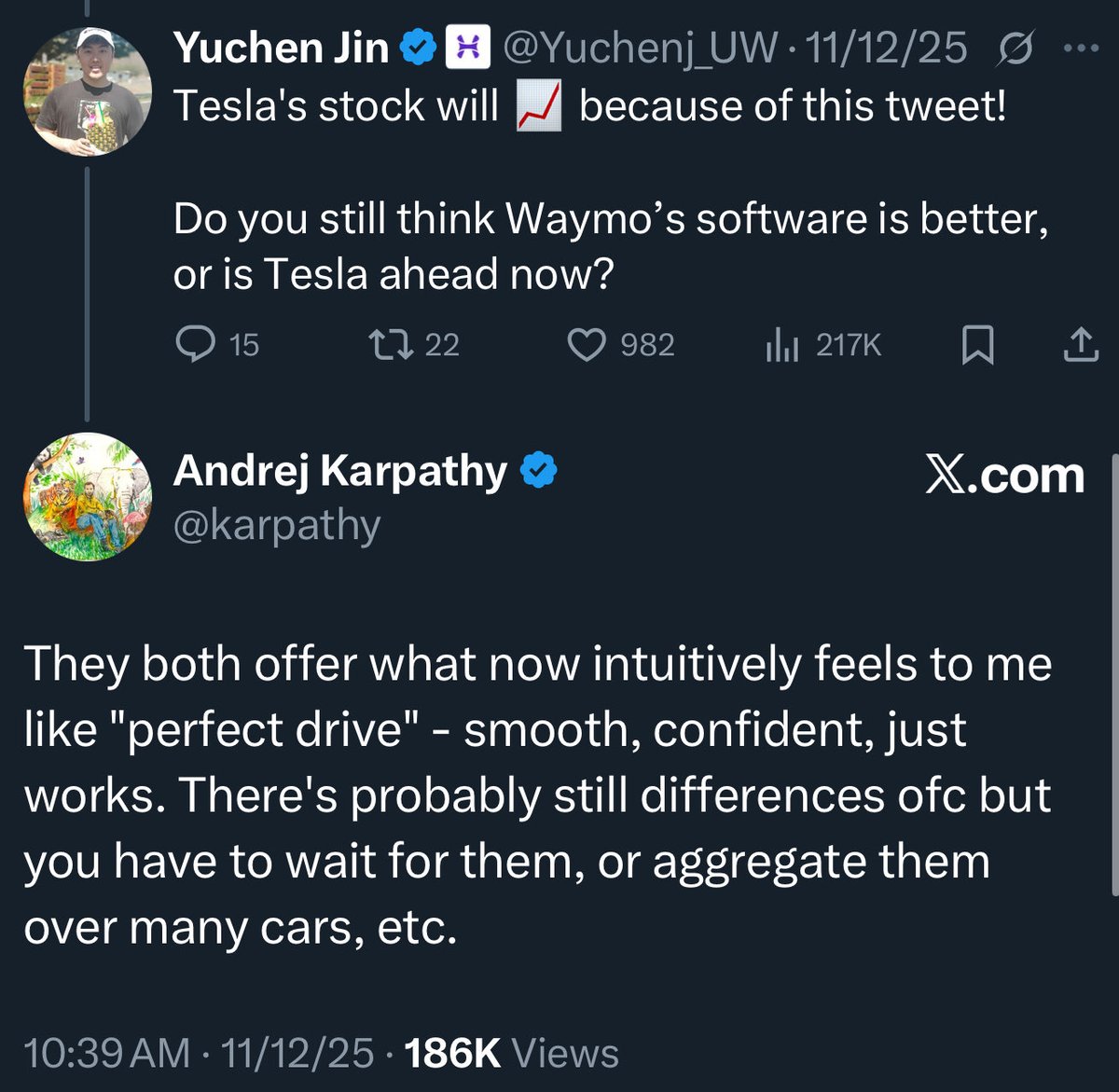
J'ai demandé à Andrej s'il pensait toujours que le logiciel de Waymo était meilleur que celui de Tesla. Il a déclaré que les deux modèles offraient pour l'instant une expérience de conduite « parfaite », qu'il y avait des différences, mais qu'il fallait attendre pour les constater. L'incident de San Francisco en était un exemple.