J'ai vraiment mis le paquet pour la nouvelle version de beads_viewer (bv). La version originale de bv a été développée en une seule journée et comptait un peu moins de 7 000 lignes de Go. Cette nouvelle version en compte… 80 000 ! J'y ai ajouté un nombre incroyable de fonctionnalités géniales. Vos agents vont l'adorer (et vous aussi !).



Voici quelques captures d'écran supplémentaires de la fonctionnalité qui vous permet d'exporter automatiquement vos perles vers un site statique sur GitHub Pages à l'aide de l'utilitaire gh :


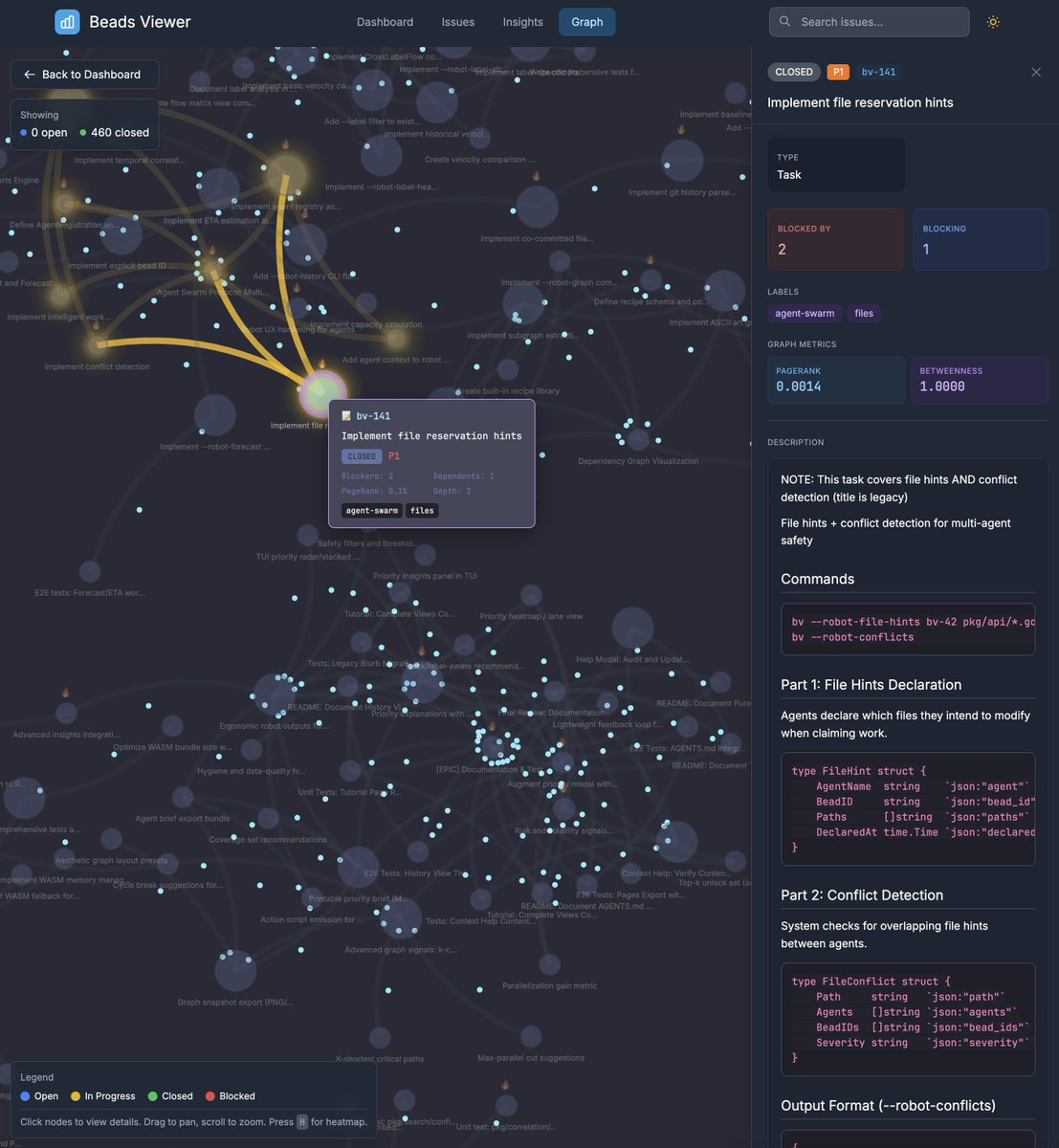
Vous pouvez tester un exemple en direct pour le projet beads_viewer lui-même (teldicklesworthstone.github.io/beads_viewer-p…https://t.co/UhboFtbSdZ
L'interface utilisateur de TUI a également bénéficié d'une multitude d'améliorations et de nombreuses nouvelles fonctionnalités utiles :




Mais la plus grande amélioration en termes d'utilité réelle ne vous concerne pas, vous les humains ! Elle concerne vos agents de programmation. Il leur suffit d'exécuter une simple commande, bv --robot-triage, et ils obtiennent instantanément une mine d'informations sur les prochaines étapes à suivre.


N'oubliez pas de mettre à jour le texte descriptif dans votre fichier AGENTS.md (l'outil le détecte désormais automatiquement et vous propose de l'ajouter). Le nouveau texte est plus long, mais l'espace supplémentaire dans la fenêtre de contexte en vaut largement la peine. ### Utilisation de bv comme side-car IA bv est un moteur de triage prenant en compte les graphes pour les projets Beads (.beads/beads.jsonl). Au lieu d'analyser du JSONL ou de parcourir le graphe de manière hasardeuse, utilisez les indicateurs robot pour obtenir des résultats déterministes et prenant en compte les dépendances, avec des métriques précalculées (PageRank, centralité d'intermédiarité, chemin critique, cycles, HITS, vecteur propre, k-cœur). **Délimitations du périmètre :** bv gère les tâches à accomplir (tri, priorisation, planification). Pour la coordination entre agents (messagerie, prise en charge des tâches, réservation de fichiers), utilisez [MCP Agent Mail](https://t.co/vi3HxBUknU). **⚠️ IMPORTANT : Utilisez UNIQUEMENT les options `--robot-*`. La commande `bv` seule lance une interface utilisateur interactive qui bloque votre session.** #### Le flux de travail : commencer par le triage **`bv --robot-triage` est votre point d'entrée unique.** Il renvoie tout ce dont vous avez besoin en un seul appel : - `quick_ref` : aperçu rapide des décomptes + 3 meilleurs choix - `recommandations` : éléments exploitables classés par ordre de priorité, avec scores, justifications et informations de déblocage - `quick_wins` : éléments à faible effort et à fort impact - `blockers_to_clear` : éléments qui débloquent les tâches en aval les plus importantes - `project_health` : distributions de statut/type/priorité, métriques graphiques - `commands` : copier-coller les commandes shell pour les étapes suivantes bv --robot-triage # LA MÉGA-COMMANDE : commencez ici bv --robot-next # Minimal : commande de sélection et de revendication unique #### Autres commandes **Planification:** | Commande | Retourne | |---------|---------| | `--robot-plan` | Pistes d'exécution parallèles avec listes `unblocks` | | `--robot-priority` | Détection des erreurs d'alignement de priorité avec un niveau de confiance | **Analyse graphique :** | Commande | Retourne | |---------|---------| | `--robot-insights` | Métriques complètes : PageRank, centralité d'intermédiarité, HITS (hubs/autorités), vecteur propre, chemin critique, cycles, k-core, points d'articulation, slack | | `--robot-label-health` | Santé par étiquette : `health_level` (sain\|avertissement\|critique), `velocity_score`, `staleness`, `blocked_count` | | `--robot-label-flow` | Dépendance inter-étiquettes : `flow_matrix`, `dependencies`, `bottleneck_labels` | | `--robot-label-attention [--attention-limit=N]` | Étiquettes classées par attention selon : (pagerank × staleness × block_impact) / velocity | **Historique et suivi des modifications :** | Commande | Retourne | |---------|---------| | `--robot-history` | Corrélations entre les billes et les commits : `stats`, `histories` (événements/commits/jalons par bille), `commit_index` | | `--robot-diff --diff-since ` | Modifications depuis la référence : nouveaux/résolus/modifiés problèmes, cycles introduits/résolus | **Autres commandes :** | Commande | Retourne | |---------|---------| | `--robot-burndown ` | Dépassement du sprint, modifications de périmètre, éléments à risque | | `--robot-forecast ` | Prédictions d'ETA avec planification tenant compte des dépendances | | `--robot-alerts` | Problèmes obsolètes, cascades bloquantes, incompatibilités de priorité | | `--robot-suggest` | Hygiène : doublons, dépendances manquantes, suggestions d’étiquettes, ruptures de cycle | | `--robot-graph [--graph-format=json\|dot\|mermaid]` | Exportation du graphe de dépendances | | `--export-graph ` | Visualisation HTML interactive autonome | #### Portée et filtrage bv --robot-plan --label backend # Portée du sous-graphe de l'étiquette bv --robot-insights --as-of HEAD~30 # Point historique dans le temps bv --recipe actionable --robot-plan # Pré-filtre : prêt à fonctionner (aucun bloqueur) bv --recipe high-impact --robot-triage # Préfiltre : meilleurs scores PageRank bv --robot-triage --robot-triage-by-track # Grouper par flux de travail parallèles bv --robot-triage --robot-triage-by-label # Grouper par domaine #### Comprendre la sortie du robot **Tout le JSON du robot comprend :** - `data_hash` — Empreinte numérique du fichier source beads.jsonl (vérifie la cohérence entre les appels) - `status` — État par métrique : `calculé|approx|délai|ignoré` + ms écoulées - `as_of` / `as_of_commit` — Présent lors de l'utilisation de `--as-of` ; contient la référence et le SHA résolu **Analyse en deux phases :** - **Phase 1 (instantanée) :** degré, tri topographique, densité — toujours disponible immédiatement - **Phase 2 (asynchrone, délai d'attente de 500 ms) :** PageRank, centralité d'intermédiarité, HITS, vecteur propre, cycles — consultez les indicateurs `status` **Pour les graphes de grande taille (> 500 nœuds) :** Certaines métriques peuvent être approximatives ou ignorées. Consultez toujours `status`. #### jq Guide de référence rapide bv --robot-triage | jq '.quick_ref' # Résumé en un coup d'œil bv --robot-triage | jq '.recommendations[0]' # Meilleure recommandation bv --robot-plan | jq '.plan.summary.highest_impact' # Meilleure cible de déblocage bv --robot-insights | jq '.status' # Vérifier l'état de préparation des métriques bv --robot-insights | jq '.Cycles' # Dépendances circulaires (à corriger !) bv --robot-label-health | jq '.results.labels[] | select(.health_level == "critical")' **Performances :** Phase 1 instantanée, Phase 2 asynchrone (délai d’attente de 500 ms). Privilégiez `--robot-plan` à `--robot-insights` lorsque la vitesse est primordiale. Les résultats sont mis en cache par hachage des données. Utilisez bv au lieu d'analyser beads.jsonl — il calcule le PageRank, les chemins critiques, les cycles et les pistes parallèles de manière déterministe.
En tout cas, dites-moi ce que vous en pensez ! Vous pouvez télécharger bv ici : c’est toujours gratuit, toujours 100 % open source sous licence MIT, et cela fgithub.com/Dicklesworthst…ble de 7 outils pour le développement d’agents : https://t.co/pGNHTEqQHH
Vous pouvez explorer le modèle de la roue d'inertie sur mon site web personnel remanié, que mes agents ont pris plaisir à personnaliser pour moi pendant que je travaillais sur d'autres projjeffreyemanuel.com/projectsutils mêmes qu'ils m'ont décrits : https://t.co/2usm1h4hUf