Andrej Karpathy dijo hace un año: “Waymo tiene un problema de hardware, mientras que Tesla tiene un problema de software”. El apagón de San Francisco congeló a Waymo, pero no a Tesla FSD. En mi opinión, esta es la razón: Waymo es modular: se basa en mapas HD, LiDAR, sensores, 5G y numerosas redes neuronales. Funciona bien hasta que falla un módulo. Cuando se apagaron los semáforos, el mapa HD dejó de coincidir con la realidad, por lo que el coche se detuvo automáticamente (modo ladrillo). Además, los coches perdieron la conexión con los operadores remotos. El FSD de Tesla es integral: una red neuronal masiva convierte los píxeles de la cámara directamente en dirección y frenado. Esto sigue la idea del Software 2.0 de Andrej: en lugar de escribir lógica manual en C++ para cada escenario, se entrena una red neuronal con miles de millones de kilómetros recorridos por humanos. El "código" son los pesos del modelo. Se conduce de forma más parecida a la de un humano. Creo que Waymo tiene un grave problema de software. Su enfoque modular es una trampa de escalabilidad y dependencia. A largo plazo, el FSD de Tesla sale ganando.
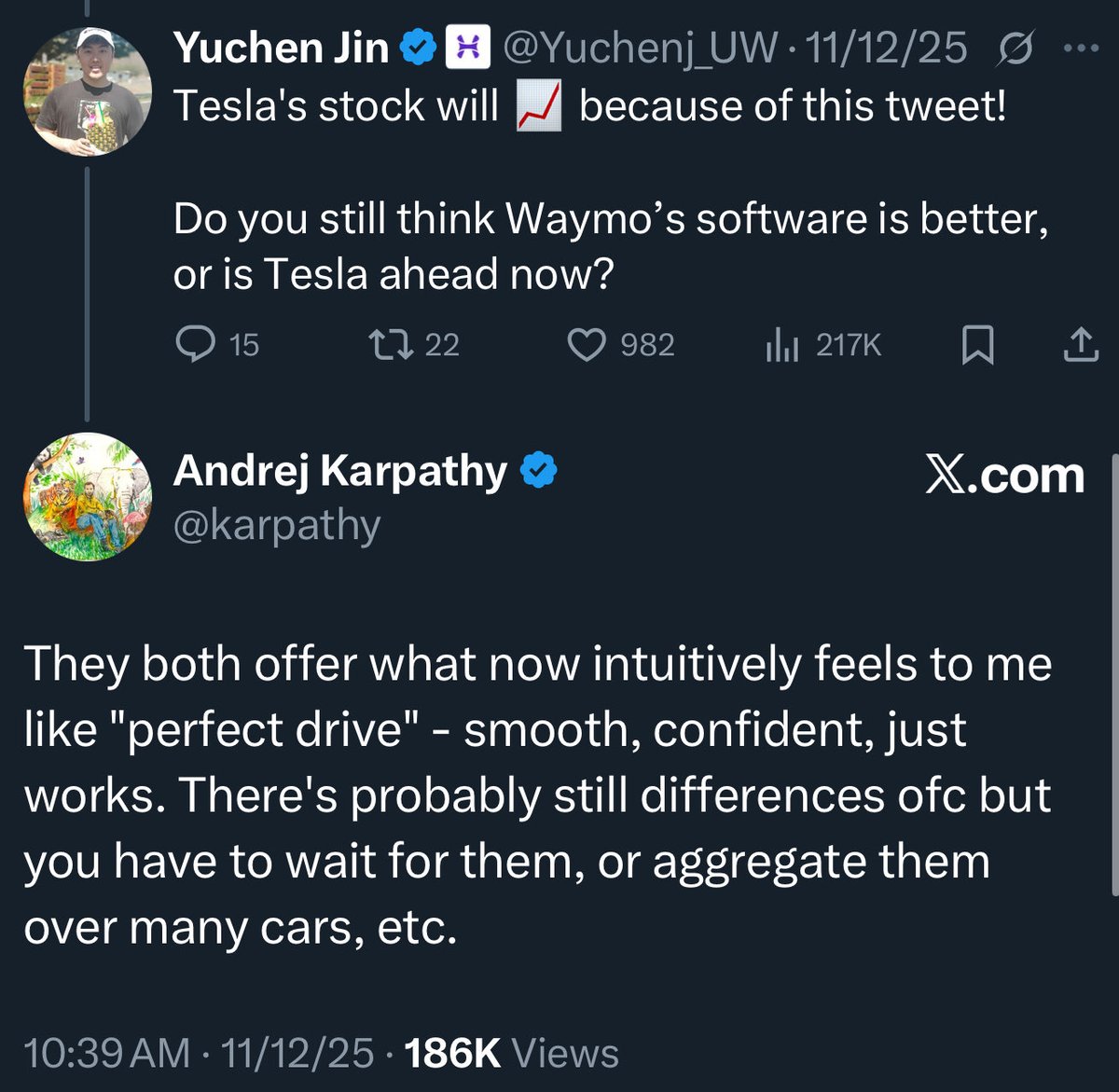
Le pregunté a Andrej si todavía cree que el software de Waymo es mejor que el de Tesla. Dijo que ahora ambos se sienten como una "conducción perfecta", que hay diferencias, pero que hay que esperar. El incidente de San Francisco fue un ejemplo.