Me esforcé al máximo para la nueva versión de beads_viewer (bv). La versión original de bv se creó en un solo día y tenía poco menos de 7 mil líneas de Golang. Esta nueva versión tiene… 80 mil líneas. Agregué una cantidad increíble de funciones geniales. A tus agentes les encantará (y a ti también).
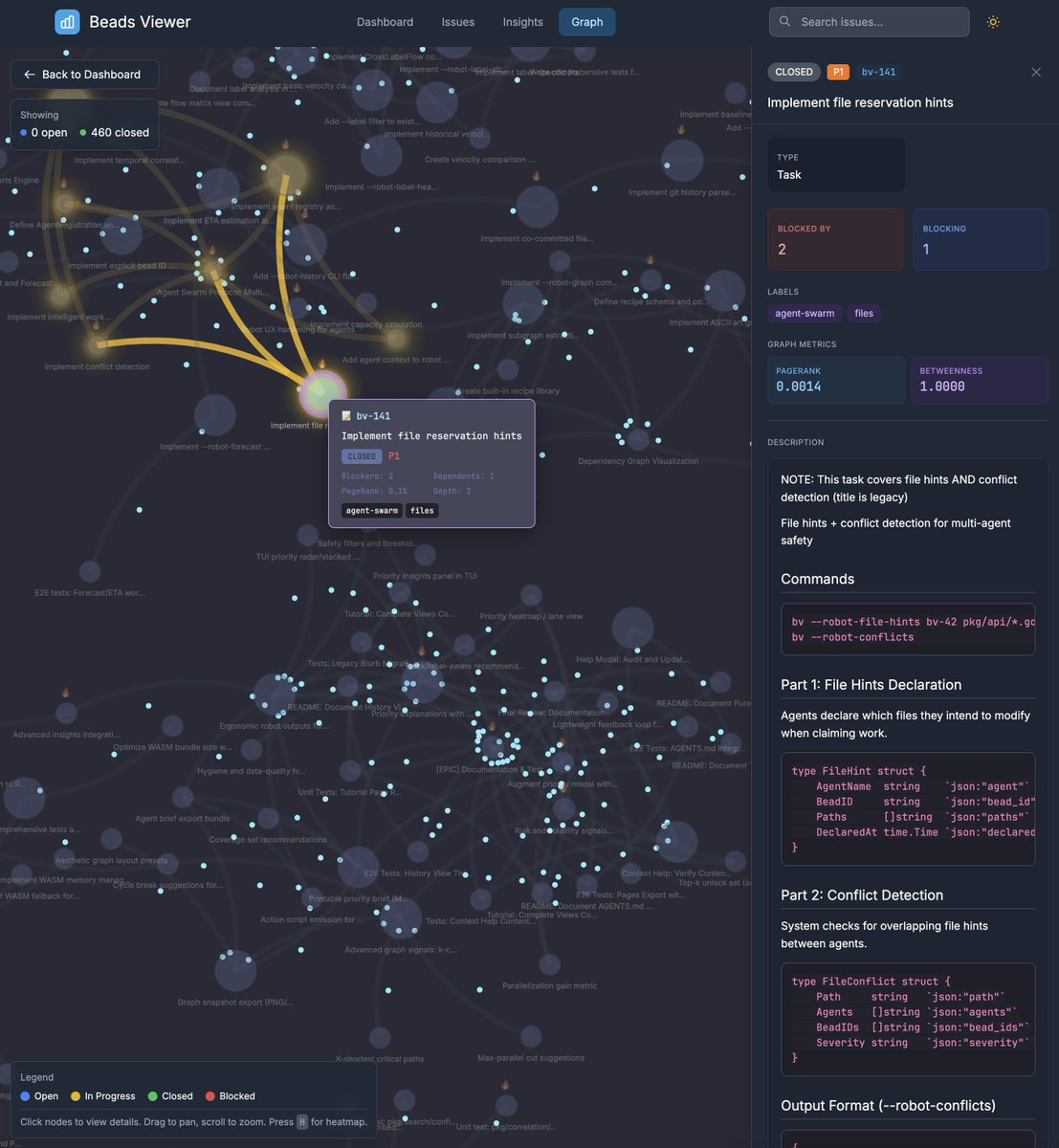



Algunas capturas de pantalla más de la función que le permite exportar automáticamente sus cuentas a un sitio estático en las páginas de GitHub usando la utilidad gh:


Puedes probar un ejemplo en vivo para el proyecto beads_viewer en sí (¡tan meta!)dicklesworthstone.github.io/beads_viewer-p…hboFtbSdZ
La TUI también recibió toneladas de mejoras y muchas funciones nuevas y útiles:




Pero la mayor mejora en términos de utilidad real no es para ustedes, los humanos, sino para sus agentes de programación. Solo necesitan ejecutar un comando simple, bv --robot-triage, y al instante obtienen una enorme cantidad de información sobre qué hacer a continuación.


Asegúrate de actualizar la sinopsis en tu archivo AGENTS.md (aunque la herramienta ahora lo detecta automáticamente y te pregunta si quieres que la agregue). La nueva sinopsis es más larga, pero vale la pena añadir tokens adicionales a la ventana de contexto: ### Usando bv como sidecar de IA bv es un motor de triaje con reconocimiento de grafos para proyectos Beads (.beads/beads.jsonl). En lugar de analizar JSONL o simular un recorrido de grafos, utiliza indicadores de robot para obtener resultados deterministas que reconocen las dependencias con métricas precalculadas (PageRank, intermediación, ruta crítica, ciclos, HITS, vector propio, k-core). **Límite de alcance:** bv gestiona *en qué trabajar* (triaje, prioridad, planificación). Para la coordinación entre agentes (mensajería, solicitud de trabajo, reserva de archivos), utilice [MCP Agent Mail](https://t.co/vi3HxBUknU). **⚠️ IMPORTANTE: Use solo indicadores `--robot-*`. El `bv` solo inicia una interfaz de usuario interactiva que bloquea su sesión.** #### El flujo de trabajo: comience con el triaje **`bv --robot-triage` es su único punto de entrada.** Devuelve todo lo que necesita en una sola llamada: - `quick_ref`: recuentos de un vistazo + las 3 mejores selecciones - `recomendaciones`: elementos procesables clasificados con puntajes, razones e información de desbloqueo - `quick_wins`: elementos de alto impacto y bajo esfuerzo - `blockers_to_clear`: elementos que desbloquean el trabajo más descendente - `project_health`: distribuciones de estado/tipo/prioridad, métricas de gráficos - `comandos`: copiar y pegar comandos de shell para los próximos pasos bv --robot-triage # EL MEGA-COMANDO: comienza aquí bv --robot-next # Mínimo: solo el comando de selección superior + reclamo #### Otros comandos **Planificación:** | Comando | Devuelve | |---------|---------| | `--robot-plan` | Pistas de ejecución paralela con listas de `desbloqueos` | | `--robot-priority` | Detección de desalineación de prioridad con confianza | **Análisis gráfico:** | Comando | Devuelve | |---------|---------| | `--robot-insights` | Métricas completas: PageRank, intermediación, HITS (centros/autoridades), vector propio, ruta crítica, ciclos, k-core, puntos de articulación, holgura | | `--robot-label-health` | Estado de salud por etiqueta: `health_level` (healthy\|warning\|critical), `velocity_score`, `staleness`, `blocked_count` | | `--robot-label-flow` | Dependencia entre etiquetas: `flow_matrix`, `dependencies`, `bottleneck_labels` | | `--robot-label-attention [--attention-limit=N]` | Etiquetas clasificadas por atención por: (pagerank × obsolescencia × block_impact) / velocidad | **Historial y seguimiento de cambios:** | Comando | Devuelve | |---------|---------| | `--robot-history` | Correlaciones de cuenta a confirmación: `stats`, `histories` (eventos/confirmaciones/hitos por cuenta), `commit_index` | | `--robot-diff --diff-since ` | Cambios desde la referencia: problemas nuevos/cerrados/modificados, ciclos introducidos/resueltos | **Otros comandos:** | Comando | Devuelve | |---------|---------| | `--robot-burndown ` | Sprint en desarrollo, cambios de alcance, elementos en riesgo | | `--robot-forecast ` | Predicciones de ETA con programación consciente de dependencias | | `--robot-alerts` | Problemas obsoletos, cascadas de bloqueo, desajustes de prioridades | | `--robot-suggest` | Higiene: duplicados, dependencias faltantes, sugerencias de etiquetas, interrupciones de ciclo | | `--robot-graph [--graph-format=json\|dot\|mermaid]` | Exportación del gráfico de dependencia | | `--export-graph ` | Visualización HTML interactiva autónoma | #### Alcance y filtrado bv --robot-plan --label backend # Alcance del subgrafo de la etiqueta bv --robot-insights --as-of HEAD~30 # Punto histórico en el tiempo bv --recipe actionable --robot-plan # Prefiltro: listo para funcionar (sin bloqueadores) bv --recipe high-impact --robot-triage # Prefiltro: puntuaciones de PageRank más altas bv --robot-triage --robot-triage-by-track # Agrupar por flujos de trabajo paralelos bv --robot-triage --robot-triage-by-label # Agrupar por dominio #### Entendiendo la salida del robot **Todos los JSON del robot incluyen:** - `data_hash` — Huella digital del archivo fuente beads.jsonl (verificar la consistencia entre llamadas) - `status` — Estado por métrica: `computed|approx|timeout|skipped` + ms transcurridos - `as_of` / `as_of_commit` — Presente cuando se usa `--as-of`; contiene referencia y SHA resuelto **Análisis de dos fases:** - **Fase 1 (instantánea):** grado, clasificación topográfica, densidad — siempre disponible de inmediato - **Fase 2 (asíncrona, tiempo de espera de 500 ms):** PageRank, intermediación, HITS, vector propio, ciclos: comprobar indicadores de `estado` **Para gráficos grandes (más de 500 nodos):** Algunas métricas pueden ser aproximadas u omitidas. Siempre verifique el estado. #### jq Referencia rápida bv --robot-triage | jq '.quick_ref' # Resumen rápido bv --robot-triage | jq '.recommendations[0]' # Recomendación principal bv --robot-plan | jq '.plan.summary.highest_impact' # Mejor objetivo de desbloqueo bv --robot-insights | jq '.status' # Verificar la preparación de la métrica bv --robot-insights | jq '.Cycles' # Dependencias circulares (¡hay que arreglarlo!) bv --robot-label-health | jq '.results.labels[] | select(.health_level == "critical")' **Rendimiento:** Fase 1 instantánea, Fase 2 asíncrona (tiempo de espera de 500 ms). Se prefiere `--robot-plan` en lugar de `--robot-insights` cuando la velocidad es importante. Los resultados se almacenan en caché mediante hash de datos. Utilice bv en lugar de analizar beads.jsonl: calcula PageRank, rutas críticas, ciclos y pistas paralelas de forma determinista.
En fin, ¡cuéntame qué te parece! Puedes obtenerlo aquí, siempre gratis, 100 % de código abierto con licencia MIT y parte de mi rueda de inercia de 7 herramiengithub.com/Dicklesworthst…n de agentes: https://t.co/pGNHTEqQHH
Puedes explorar el volante en mi sitio web personal renovado, que disfruté que mis agentes personalizaran para mí mientras trabajaba en otras cosas, usando las mismas herramientas que me dejeffreyemanuel.com/projects.co/2usm1h4hUf